苏黎世科学家开发3D打印微型机器人,用于在人体内给药
作者:摘自网络 发布日期:2020-12-03 点击量:2814
苏黎世联邦理工学院的科学家开发了微型3D打印微型机器人,该微型机器人能够通过人体血管传递药物有效载荷。
通过将软光刻技术与电化学沉积技术相结合,该团队得以制造出可通过磁场控制的多材料产品。未来,科学家认为,他们的生物相容性微型机器人可以在外科手术过程中注入患者体内,并用于远程治疗疾病。
该论文的两位主要作者之一卡洛斯·阿尔坎塔拉(CarlosAlcântara)表示:“金属和聚合物具有不同的特性,两种材料在制造微型机器方面都具有一定优势。” “我们的目标是将两者结合起来,同时从所有这些特性中受益。”
尽管互锁的机械结构已在宏观机械和纳米系统(例如分子穿梭机)中广泛使用,但它们仍无法在微尺度上使用。尽管它们可能在软机器人中应用,但它们倾向于通过有机合成进行链接,这阻止了它们与金属材料的集成。
尽管软光刻和微传递模塑方法在过去已显示出希望,但用不同材料制成的互锁零件仍然具有挑战性。但是,考虑到带有药物输送容器的可生物降解机器人的医疗潜力,该问题已成为添加剂研究的热门话题。
例如,牛津大学的科学家已经使用了折纸启发的技术来制造具有形状变形功能的微型机器人,但是它们也有局限性。机器人材料之间的附着力仍然很差,并且发现该过程本身仅允许有限数量的几何形状。
为了完全实现多材料微缩打印,苏黎世团队提出了将不同的金属和明胶“编织”在一起以形成集成微机器人的建议。通过调整此类网状结构的图案,科学家们还得出理论认为,可以对它们进行设计以使其具有某些特定于应用的特性。
苏黎世联邦理工学院的新型微缩打印方法
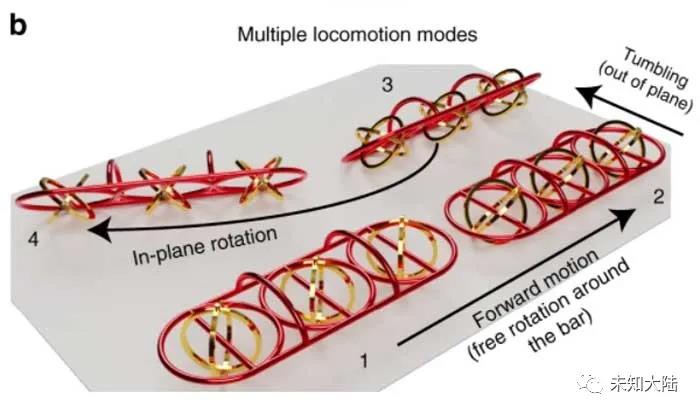
苏黎世团队设计了自己的微型机器人,以具有常用的金属笼和螺旋形状为特征,它们通过聚合物棒机械地互锁。从理论上讲,以这种方式构建微型设备可使笼子在内部自由旋转,从而导致翻滚动作并最终导致速度和运动。
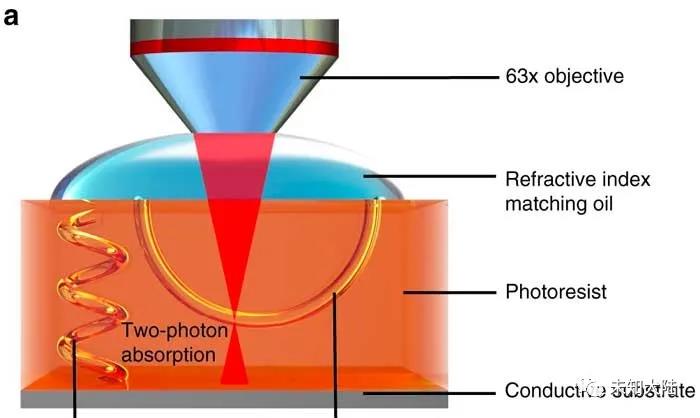
为了将他们的模型变成可以工作的原型,科学家们使用了Nanoscribe TPP系统来填充预制模具,然后用溶剂溶解模板。在此过程中,团队发现他们能够在一个步骤中3D打印两种不同的几何形状,从而产生了一个互锁的微型机器人。
进一步的测试表明,可以使用形状记忆聚合物制造该设备,并加载有色染料,从而增强其药物传递能力。而且,该团队还能够利用磁场抵抗各种摩擦力并使用不同的旋转方式来操纵机器人。
后来还设计了其他带有PDMS亲水框架的模型,使它们具有橡胶“船”的外观。这些经过液体优化的装置能够克服很大的阻力来推动自身前进,从而满足了血管扩张药物输送系统的另一个重要要求。
尽管团队承认2PP仍然太慢而无法大规模生产其设备,但他们仍然认为他们的方法是成功的。通过进一步的研究,科学家们相信他们的机器人不仅可以用于药物输送,还可以用于实现诸如支架之类的手术工具。


 渝公网安备50010502504042
渝公网安备50010502504042